Tel/WeChat:
Tel/WeChat:  Email:
Email: 
 Home
HomeTypes of Robot Joints and Degrees of Freedom: Complete Engineering Guide

 Published:Apr 08,2026
Published:Apr 08,2026 
With advancements in manufacturing and automation, robots have become common in precision systems. Humanoid robots are being used, which can sense and perform in human-like environments. Robot joints and degrees of freedom are fundamental things in these things. This guide presents comprehensive information on robot joints and degrees of freedom and introduce how robot joints are manufactured by CNC machining.
What Are Robot Joints
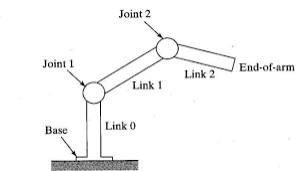
Robot joints are mechanical connections between rigid links in a robot that enable relative motion. links and joints are basic building blocks for robot. Links are the rigid members, and joints are the connections, which enable motion between these members. So, a robot joint is a part of a robot that enable motion between the rigid components.
What Types of Robots Use Joints?
Joints are not used in every robot because it is the place where motion happens. These joints are used when controlled and predictable motion is required. The following robots use joints:
- Humanoid Robot
- Industrial robots
- Service robots
- Cobots
Is CNC Machining Suitable for Robot Joints?
Robotic joints are important because they are responsible for precise and isolated motion, a finite and manageable degree of freedom (DOF), ease of manufacturing, and assembly. So, these parts require higher precision with tight tolerances, which is why almost all the parts are manufactured through CNC machining.
Components of Robot Joints
Robot joints include many components. Here let us explore these key components and their functions. With different features, they are usually manufactured by different CNC machining techinques such as turning, milling or drilling.
Link Interface
It is an engineered contact region between two robotic links at a joint. It is designed to provide controlled motion, transmit loads, and ensure alignment.
CNC Turning and Milling Link Interface
CNC Turning machines the rotational interface features through facing, rough turning, and grooving, etc. These features include:
Shaft
- Cylindrical bosses
- Bearing seats
- CNC Milling
This CNC operation is used to manufacture the interface geometry. These axisymmetric features include:
- Flat mounting face
- Bolt hole patterns
- Slots, keyways
- Bearing housings
Face milling, pocket milling, and drilling, etc., are used in milling operations.
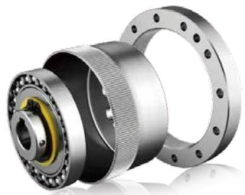
Bearing
An intermediate component between two links that is responsible for supporting motion to the desired DOF and carrying load while ensuring minimal friction and wear.
CNC Grinding Bearing
CNC grinding is a finishing process in the manufacturing of a bearing. It is performed to meet the tight tolerance of +/- 10µm and surface finish of Ra 1.6 - 3.2 µm.
Actuator
This part of a robot joint is responsible for converting electrical or hydraulic energy into mechanical movement at the joint. It generates torque in robot joints, like in revolute or prismatic joints.
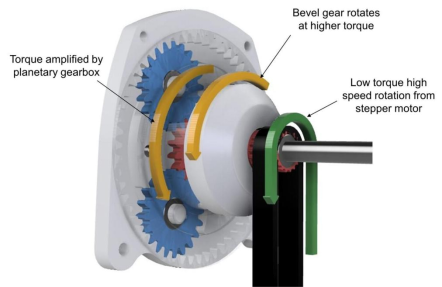
Transmission Mechanism
It is a system in robot joints, which transfers and modifies motion from the actuator to the joint output.
CNC Machining for Transmission Mechanism
CNC machining for that system means the manufacturing of its parts, such as gears, shafts, etc. For instance:
- CNC turning for gear blanks, shafts
- CNC milling for gear teeth, housings
- CNC grinding for bearing surfaces
Housing
Housing is a structural body that holds together all internal components, including the transmission mechanism and joints. Most of housing are manufactured by CNC machining.
Sensor
It measures specific parameters, like position, speed, torque, etc. It feeds that information to the robot's control system, which produces joint movement accurately and safely.
Functions of Robot Joints
Robot joints perform the following functions in a robot:
Enable Motion
In a robot, joints are connected to an actuation system, which can be a hydraulic actuator or pneumatic cylinder. When it sends a command, the actuator generates torque, which causes the joint to move. Since the joints connect two links, the motion is transferred to the next link in the chain.
Control Position
Robot joints combine actuators, sensors, and control systems that work closely in a loop to help movement to an exact, repeatable location and stop there precisely.
- Actuators move the joints
- Sensors provide real-time feedback
- Controllers adjust motion to minimize error and achieve precise positioning
Support Loads
Robot joints don't just handle the weight of the parts but also balance continuous motion, torque, and force. It is done by:
Gear: transmit and multiply torque
Bearing: carry the physical load
Structure: Distribute the stress
Motor: drive the motion
Enable Flexibility
In robotics, flexibility means how easily a joint allows precise and multi-directional motion in a robot. A joint enables flexibility through degrees of freedom. Each joint has its own DOF. Further, support is provided by gears and bearings.
What Are Degrees of Freedom in Robotics?
In the world of robots, degrees of freedom refer to how many directions a robot can move independently without any restrictions. For instance, if there is one 1 DOF in a robot, it means it can move in one direction only, which can be rotation only.
How DOF Determines Robot Capability
Capability means the types of functions a robot can perform. DOF directly determines the workspace capability of the robot. The higher the DOF, the more capable the robot is. For instance, if a robot has 6 DOF, it means it can move independently in 6 different directions, i.e., rotation, up, down, right, left, etc.
Typical DOF in Robots (4, 5, 6, 7 DOF)
Typical DOF values in robots are 3, 4, 6, and 7+. The robots are employed in different fields based on their DOF values. For instance, a robot with 4 DOF is used in simpler systems, like palletizing, and a robot with a DOF value of 7+ is used in advanced applications, like humanoid robots. Humanoid robots with higher degrees of freedom rely on CNC machining to produce precise and complex joint components.
Why 6 DOF Is the Industry Standard
A 6 DOF standard is the industry standard robot because of mature software, tooling, fixtures, and easier integration in manufacturing lines. 6 DOF provides tasks compatibility, like welding, machining, and assembly, etc.
Types of Robot Joints
There are multiple types of robot joints, and they are categorized based on the degree of freedom. For instance, for a single DOF, the types of robot joints are different than two degrees of freedom.
Single Degree of Freedom
A single degree of freedom means a joint can move independently only in one direction. That means it can only rotate or move horizontally or vertically. Such types of joints are employed in simple applications.
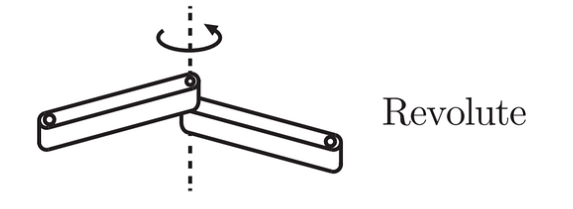
Revolute Joint
This joint is responsible for the rotation of a robot about a fixed axis. The example can be a hinge. DOF for this robotic joint is 1. Its common example is a robotic arm which is used for pick-and-place operation or welding only.
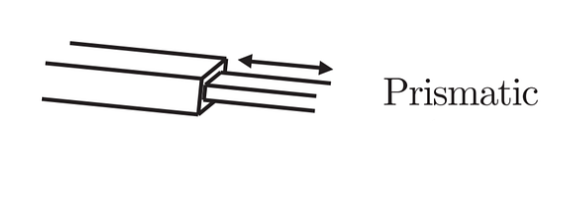
Prismatic Joint
This joint is responsible for the movement in a straight direction along a fixed axis. DOF for this robotic joint is 1. It is used in a Cartesian robot for applications such as CNC machines, 3D printers, etc.
Two Degree of Freedom
Two degree of freedom means a joint can move independently only in two directions. That means it can rotate and move in linear motion. Such types of joints are employed in multiple-task applications.
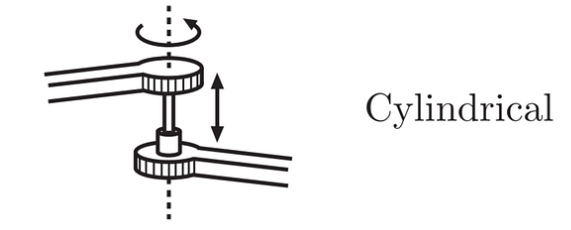
Cylindrical Joint
It is a kinematic pair used in robotics which provides one rotational DOF and one translational DOF. It is like a shaft inside a hollow cylinder which can slide in/out and rotate simultaneously. In simple words, it is a combination of revolute and prismatic joints.
Universal Joint
It is also called a U-joint and provides 2 degrees of freedom, but it is completely different from a cylindrical joint. It allows two independent angular motions, i.e., tilt forward/backward and tilt left/right. A human wrist is a classic example of this joint, which bends up/down and left/right.

Planar Joint
A planar joint enables a robot to move in 2 degrees of freedom, i.e., translation along the X-axis and translation along the Y-axis. The motion is restricted to flat surfaces.
Three Degree of Freedom
Three degrees of freedom mean an independent movement in three different directions, let's say in X, Y, and Z axes.
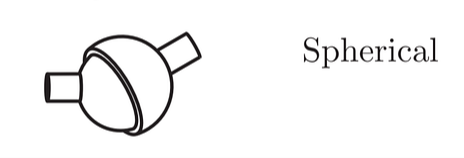
Spherical Joint
A spherical joint consists of a spherical member (ball), allowing multidirectional rotation. This joint provides independent rotation in X, Y, and Z, which makes it a ball-and-socket joint in the human body, like the shoulder or hip.
Compound Joints
As the name itself suggests, it is a combination of two or more simple joints, like revolute, prismatic, spherical, etc. It can achieve complex trajectories in a small volume.
Robotic Systems with More Than 3 DOF
There is a difference between the DOF of a robotic joint and robotic system. A robotic joint can have DOF of maximum 3 but a robotic system can have more than 3 DOF. More than 3 DOFs allow both position and orientation control. 6-DOF industrial robot arm is a common example of such robotic systems.
Comparison of Robotic Joints
|
Joint Type |
DOF |
Typical Applications |
CNC Machining Difficulty |
|---|---|---|---|
|
Revolute Joint |
1 |
Industrial robot arms, robotic manipulators |
Medium |
|
Prismatic Joint |
1 |
CNC machines, linear actuators |
Low |
|
Cylindrical Joint |
2 |
Assembly systems, telescopic mechanisms |
Medium |
|
Universal Joint |
2 |
Drive shafts, robotic wrists |
High |
|
Planar Joint |
3 |
2D robotic systems, positioning tables |
Medium |
|
Spherical Joint |
3 |
Humanoid robots, aerospace joints |
Very High |
|
Compound Joints |
Variable |
Advanced robotics, multi-axis systems |
Very High |
Common Materials for Robot Joints
Robotic joints are important parts of robots for their efficient work, so the selected materials should exhibit good mechanical properties as well as good machinability. The following materials provide a good combination of mechanical properties and machining:
Aluminum Alloys
The common Al alloys in the field of robot joints are 6061-T6, 7075-T6, and 2024-T3/T4 (used in housing and structural body). The aluminum alloys stand tall when the requirement is about the strength-to-weight ratio. These alloys are good for use in corrosive environments due to the natural passive layer. These alloys provide good thermal conductivity and exhibit good machinability.
Titanium Alloys
The use of Titanium alloys is limited in the robotics industry because of the difficulty of machining and high cost. They are used only in aerospace robots and in the manufacturing of high-performance critical robotic joints. The common Ti alloy used in these joints is Ti-6Al-4V, which provides a good balance of strength, fatigue resistance, and corrosion resistance.
Stainless Steel Robot Joints
Common stainless-steel alloys include 304 stainless steel, 316/316L stainless steel, and 17-4 PH stainless steel used in the manufacturing of covers, external parts, food-grade robots, and marine environments. Stainless steel exhibits good machinability, but it can sometimes be challenging due to work-hardening.
Engineering Plastics
Engineering plastics include Teflon, Nylon (PA6), etc. These plastics exhibit better mechanical properties than simple plastics, best suited for vibration damping. These plastics are used in sliding pads, liners, bushings, etc.
How to Make Robot Joints
Robot joints are critical parts of a robot which are responsible for efficiently producing torque and the transmission of motion throughout the body. It means these joints require highly precise machining meeting tight tolerances. To meet such dimensional precision, CNC machining is commonly used.
Common CNC Machining Techniques for Robot Joints
The common CNC machining processes used for the manufacturing of robotic joints include milling, drilling, turning, and hybrid machining.
- Milling is useful for simple shapes like brackets, flanges, and joint housings. It is a standard method for manufacturing prismatic and flat features.
- Drilling is used for threaded holes and fastener locations in joint components
- Turning is used to manufacture cylindrical components, like shafts, pins, and bushings.
- 5-Axis Machining: An advanced CNC operation, which is used for the manufacturing of complex parts. It can move along X, Y, Z axes and can also rotate around X and Y axes. A universal joint housing with surfaced internal bores and mounting flanges requires 5-axis machining to reach all surfaces accurately in a single setup.

Customize Precision Robot Joints with Tuofa
If you are searching for a reliable machining source for your projects, TUOFA is here for you. We can provide efficient machining services, meeting tight tolerance requirements thanks to our fully updated CNC machines, including 5-axis CNC machines and experienced operators.

Robot Joints Design for CNC Machining
To get higher precision in CNC machining, the design of the robot joints can be optimized by following two ways:
Optimize Geometry of Robot Joints
The geometry of the robot joint can be optimized by:
- Designing the part with respect to functional requirements
- Minimize machining complexity by avoiding cavities, undercuts, etc.
- Keep adequate wall thickness to avoid bending during CNC machining
Choose Proper Tolerance
- Understand the difference between dimensional and geometric tolerance first
- Select tolerance based on the functional requirements, the higher tolerance for a critical application
- Select tolerance according to manufacturing capability
- Always use standard tolerances
Surface Treatment for Robot Joints
After machining, surface treatment of robots is very important to ensure corrosion and fatigue resistance. The following processes are common for surface treatment:
Anodizing Aluminum Robot Joints
Anodizing is an electrochemical process where the Al robot joints are made the anode. Al reacts with O2 and forms a harder and passive layer of Al2O3. This layer provides corrosion and wear resistance along with electrical insulation and excellent surface finish.
Nickel Plating Steel Robot Joints
In this electrochemical process, Ni is deposited on steel robot joints. Ni-plating provides a uniform coating and is common for complex robotic joints. It provides a barrier against galling and seizure, along with corrosion and wear resistance.
Black Oxide Steel Robot Joints
This chemical treatment is performed in an alkaline salt bath at 140 °C - 150 °C, which forms a magnetite (Fe3O4) layer on the surface. It protects against hydrogen embrittlement and reduces friction.
Conclusion
Robot joints are an important part of a robot that perform different operations, such as feeding the information to the robot system, producing motion, etc. These joints have different DOF, which enable them to move independently in specified directions. These parts are machined through CNC operations to ensure precise fitting and efficiency in performing functions safely and precisely. Importantly, most robotic joints are made of aluminum alloy, especially 6061 and 7075 alloy.
FAQ
What are the two types of joints that allow rotation?
Revolute and spherical joints are two types of joints that allow rotation.
What is the difference between a link and a joint in robotics?
A link connects two or more joints, while a joint is a movable connection between two links that allows relative motion.
How do robot joints do?
They allow the robot links to move relative to each other, enabling a robot to perform tasks. They do by:
- Transmitting motion
- Providing degrees of freedom
- Controlling robot's pose
 Thermowell Uncovered: Sensor Protection Tube Explained
Thermowell Uncovered: Sensor Protection Tube Explained